
 手机网站
手机网站
手机网站
手机网站
ROS Kinetic只支持Wily(15.10)和Xenial(16.04)对应内核分别为4.2和4.4,使用下面命令: ~$ sudo sh -c 'echo deb $(lsb_release -sc) main /etc/apt/sources.list.d/ros-latest.list' 2.2 设
纯净定制版镜像已经发布,供ROS爱好者交流学习,在如下链接: ubuntu16.04已经发布半年多了,ROS的Kinetic版本功能包也越来越丰富了,需要了解ROS发行版及支持维护的时间
本文分享一些本人在安装和配置ros时的过程以及遇到的部分问题。 首先,不同的ubuntu版本所对应的ros版本不同,具体情况看图 给出ubuntu16.04下载链接。由上图可知,对应的
第二步: 安装合适版本的ROS 1、完全安装ros(2d、3d、rviz等) [python] view plain copy sudo apt-get install ros-kinetic-desktop-full # ros和desktop间的indigo(靛蓝)为 ros版本号
Ubuntu 16.04安装ROS-kinetic第一步:软件源配置 1、增加下载源(增加ubuntu版的ros数 sudo apt-get install ros-kinetic-desktop-full # ros
$ echo $ROS_PACKAGE_PATH 查看ros中最重要的环境变量是否设置成功(成功的标志应该是路径中有指向当前工作空间的路径,长这样:/home/你的用户名/workspace/src:/op
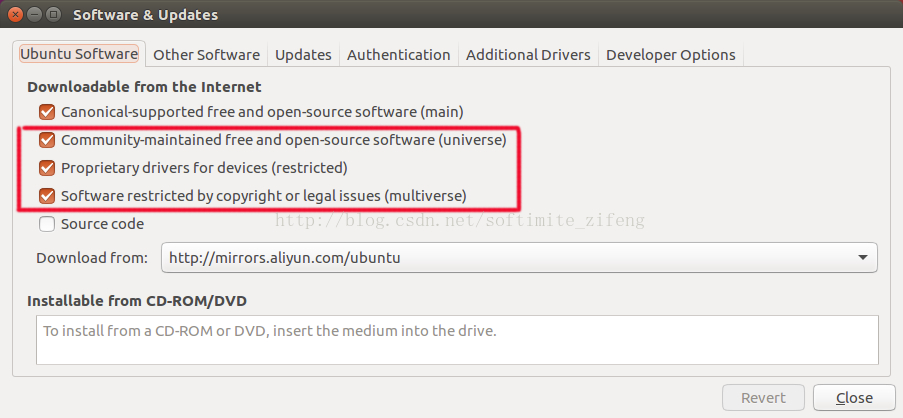
第一步: 软件源配置 1、 增加下载源(增加ubuntu版的ros数据仓库,即下载源)(通用指令适合任何版本的ros) [cpp] view plain copy sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' 2、 设置key,实现安全从数据仓库下载未被修改版,故设置key增加可信度 [cpp] view plain copy sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116 也有用下面这条指令的 [python] view plain copy wget http://packages.ros.org/ros.key -O - | sudo apt-key add - 以上两步为安全配置下载源 可以增加本地本国的源,例如再sourcelist里增加
下面我们如果想运行ROS,还需要安装Ubantu,具体型号根据自己需求,安装教程也可以在网上有详细教程,本人安装的ubantu16.04,因为此版本的ubantu系统与ROS kinetic相匹配。
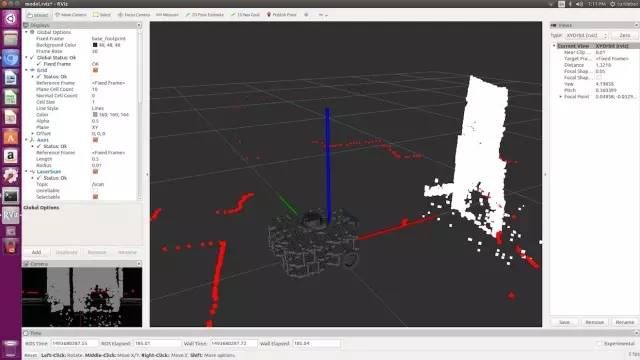
最新版本已经更新到了kinetic. 目前支持UR的资料大多作用于indigo平台,今天通过整合谷歌开发社区上的一些资料,成功地在Ubuntu16.04和ROS K

AN the ROTOR S Be installed in Ubuntu 16.04
1920x1080 - 329KB - PNG

Ubuntu 16.04安装ROS Kinetic并启动小乌龟示
498x526 - 7KB - PNG

AN the ROTOR S Be installed in Ubuntu 16.04
728x432 - 82KB - PNG

Ubuntu 16.04 安装 ROS
550x392 - 65KB - PNG

Ubuntu 16.04 安装 ROS
550x313 - 86KB - PNG

【ROS学习-1】在Ubuntu16.04里安装ROS Kin
678x260 - 56KB - PNG
器人新闻社】上手TurtleBot 3-用于学习ROS的
640x360 - 27KB - JPEG

elfin_robot
350x350 - 35KB - PNG
希捷开放存储平台
903x418 - 82KB - PNG

ROS发展之路 版本回顾篇
320x320 - 45KB - PNG

ROS 5.21版本安装及配置,实用详细教程
896x902 - 14KB - PNG

1. Ubuntu和ROS版本的对应关系
601x468 - 59KB - PNG

ROS 5.21版本安装及配置,实用详细教程
896x902 - 5KB - PNG

ROS 5.21版本安装及配置,实用详细教程
896x902 - 5KB - PNG

ROS 2 Crystal Clemmys版本发布,英特尔主导研
546x240 - 11KB - PNG
